Studies of ROV concepts 1950 - 2009

Date of publication: 2001
Authors: Jee-Hwan Ryu, & Dong-Soo Kwon
This paper presents a control scheme for obtaining high
maneuverability of underwater robot manipulators
mounted on a remotely operated vehicle (ROV).

Date of publication: 1997
Authors: Primo Zingaretti, Silvia Maria Zanoli
Abstract:
The inspection methods of underwater structures employ
remotely operated vehicles guided from a support vessel
by human operators. The risk of losing concentration calls
for developing an intelligent vision, guidance, and control
system to support human activity. This paper presents a
robust system for the detection and real-time tracking of
submarine pipelines.

Date of publication: 1998
Authors: A. Alessandri, M. Caccia, & G. Veruggio
Abstract:
A fault-diagnostic system for unmanned underwater
vehicles has been designed and tested in real operating
conditions. Actuator faults have been considered, relying
on approximate models of the vehicle's dynamics. Fault
detection and diagnosis are accomplished by evaluating
any significant change in the behavior of the vehicle. A
bank of estimators performs this task: a filter is
implemented for each actuator fault type, including the
no-fault case. The estimators used are extended Kalman
filters (EKF) due to nonlinearities in the dynamic models.
Experimental results are reported to demonstrate the
effectiveness of the proposed approach.




Date of publication: 2005
Authors: Shahriar Negahdaripour, & Pezhman Firoozfam
Abstract:
Ship hulls, as well as bridges, port dock pilings, dams, and
various underwater structures, need to be inspected for
periodic maintenance. Additionally, there is a critical need
to protect against sabotage activities and establish effective
countermeasures against illegal smuggling activities.
Unmanned underwater vehicles are suitable platforms for
developing automated inspection systems but require
integration with appropriate sensor technologies.


Date of publication: 2005
Author: G. Haugen, F. Conrad, M. Grahl-Madsen
This paper presents research results on an ROV with a
water hydraulic propulsion system developed at Bergen
University (Norway).
The design of the propulsion system was based on
components available on the market.


Date of publication: 2006
Author: M. Caccia
Abstract:
In this paper, the problem of high-precision motion
control of remotely operated vehicles (ROVs) in the
proximity of the seabed through vision-based motion
estimation is addressed. The proposed approach
integrates a cheap monocular vision system to estimate
the vehicle’s linear motion with a conventional dual-loop
hierarchical architecture for kinematics and dynamics
control.


Date of publication: 2007
Authors: Marin Stipanov, Nikola Miskovic, Zoran Vukic, &
Matko Barisic.
Abstract:
The Automarine Module is a simple cost effective method
for transforming underwater remotely operated vehicles
(ROVs) into autonomous underwater vehicles (AUVs),
with minimum development time and no ROV circuit
alteration. This paper presents the architecture of
autonomization of the VideoRay Pro II ROV together with
its technical specifications. The article also gives a
procedure for open-loop identification of the nonlinear
yaw model.


Date of publication: 2008
Authors: Raul A. Valencia, Nikola Miskovic, Zoran Vukic, &
Matko Barisic. Juan A. Ramırez, Luis B. Gutierrez,
Manuel J. Garcıa.
Abstract:
This article presents theoretical and computational studies
with Computational Fluid Dynamics (CFD) tools of an
Underwater Remotely Operated Vehicle (ROV), required
to obtain reliable visual information used for surveillance
and maintenance of ship shells and underwater structures
of Colombian port facilities.


Date of publication: 2008
Authors: Gerardo Gabriel Acosta, Hugo Curti, Oscar Calvo
Ibáñez, Silvano Rossi.
Abstract:
The main goal of this paper is to introduce the design and
working hypotheses for the construction of a low-cost
Autonomous Underwater Vehicle (AUV) devoted to
pipeline and cable inspections. Underwater inspection is
mainly necessary for the periodic surveys for the
preventive maintenance of submarine infrastructure in the
offshore industries. The advantages of doing them with
AUVs instead of Remote Operated Vehicles (ROV) or
Towed Unmanned Devices (TUD) are low costs and
better data quality in the inspection missions.




Date of publication: 1997
Authors: D.l Mearns, A.R.F. Hudson.
Abstract: Grab devices have been extensively used for
commercial cargo salvage and sensitive military recovery
projects throughout much of the past century. Early grabs
suffered from a lack of positional control and remote
intelligence and thus were not very efficient. The first truly
controllable grab was developed in the early 1970s by the
CIA in their partially successful attempt to recover a
Russian ‘Golf’ class submarine. This concept of a
controllable Grab deployed from a modified drillship was
commercialised in 1994 by Blue Water Recoveries (BWR)
with the development of a 3,000 metes rated Grab used
to recover 18 tonnes of silver coins from the SS John
Barry. Although technically successful, it was soon
apparent that this prototype Grab 3000 would need to be
improved to be able to recover cargo at even higher rates
of efficiency.


Date of publication: 2006
Authors: Mario Jordan & Jorge Bustamante
Abstract:
This paper analyzes the stability of an umbilical–ROV
system under nonlinear oscillations in heave motion by
using numerical methods for the uncontrolled and
controlled cases comparatively. Mainly the appearance of
the so-called taut–slack phenomenon on the umbilical
cable produced by interactions of monochromatic waves
and an operated ROV is specially focused. Nonlinear
elements are considered as nonlinear drag damping,
bilinear restoring force, and saturation of the actuators.
Free-of-taut/slack stability regions are investigated in the
space of physical bifurcation parameters involving a set of
both operation and design parameters.

Date of publication: 2009
Authors: Kyle N. Winfree, Jamie E. Gewirtz, Thomas
Mather, Jonathan Fiene, and Katherine J.
Kuchenbecker
This paper discusses the design and operation of the
iTorqU 2.0, an ungrounded, handheld torque feedback
device for haptic applications.

Date of publication: 2007
Authors:
Zoran Fabekovic, Zdravko Eškinja, Zoran Vukic
The ROV Simulator was developed as modular structure
with the possibility of connecting signals received from the
real ROV. Programming language VRML helped in
developing a 3D model of the ROV and the interaction
between the ROV and the virtual world has been
achieved. The kinematics of the ROV was implemented for
simulator needs. The simulator menu offers different virtual
environments. The simulator has different additional
possibilities such as: gripper management, realistic
illumination and camera manipulations.


Date of publication: 2007
Authors:
Steve Cohan
Abstract:
This paper describes three new directions in the
development of ROV control systems:
exploiting the capabilities of digital video, using model-
based control techniques for ROV operations, and
providing ROV systems with sophisticated remote
diagnostics. Goals of these trends are to increase the value
of ROV operations end products (such as video), to
increase efficiency of operations by adding automation,
and to increase productive time by bringing outside
resources to the ROV for maintenance and
troubleshooting.




Authors: Chua Kia & Mohd Rizal Arshad
This paper presents a robotics vision-based heuristic
reasoning system for underwater target tracking and
navigation. This system improves the level of automation
of underwater Remote Operated Vehicles (ROVs)
operations. A prototype that combines computer vision
with an underwater robotics system is designed and
developed to perform target tracking and intelligent
navigation. This study focuses on developing image
processing algorithms and fuzzy inference systems to
analyze the terrain.


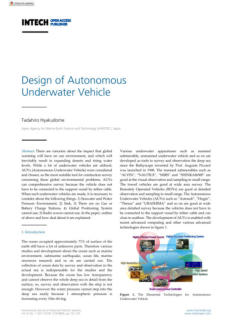
Author: Tadahiro Hyakudome
AUVs (Autonomous Underwater Vehicles) are considered
the most suitable tools for conduction survey concerning
these global environmental problems. they can make
surveys because they do not
have to be connected to support vessels by tether cables.
When such underwater vehicles are made, it is necessary
to consider the seawater and water pressure
environment, the fact that the vehicle may sink, that there
is no possibility to supply the machine during its
operations, that the radio waves and the GPS cannot be
used.

Authors: G. Conte, S. M. Zanoli, D. Scaradozzi
In this paper, the design of the overall architecture and
the development of specific components of a
supervised, automatic system for guidance of an ROV
are described. Basically, automation is achieved by
inserting a PC, equipped with A/D-D/A boards, in the
operator/ROV loop. In this way, the original
configuration of the ROV manual guidance system is
substituted by a more versatile, user-friendly and
powerful PC-based configuration.


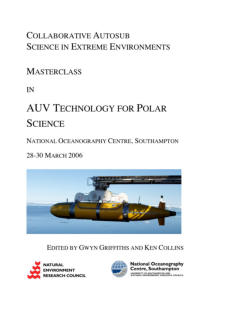
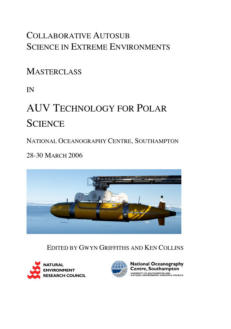
Authors: Gwyn Griffiths & Art Trembanis
This paper reviews published work on AUV reliability and
develops a risk management process (RMP-AUV) tuned to
the needs of the responsible owner working with a
technical support team.
The RMP-AUV provides a framework for the responsible
owner to determine an acceptable risk using mainly
objective information, augmented with subjective
judgement on the priority of the proposed vehicle
campaigns.

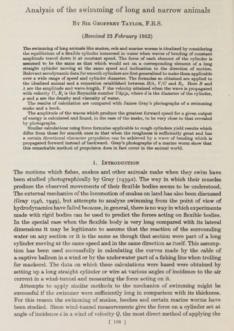
Date of publication: 1952
Author: Sir Geoffrey Taylor
This document has been taken in reference by ROV and
AUV conceptors for the development of bio-inspired
machines capable of moving in water and visiting areas
not accessible to conventional machines.

Date of publication: 1960
Author: Yao-tsu wu
The purpose of this paper is to study the basic principles of
fish propulsion. It has been taken in reference by ROV and
AUV designers for the development of bio-inspired
machines capable of moving in water without using
propellers.


Date of publication: 1979
Author: R. W. Blake
The purpose of this paper is to study the basic principles of
fish propulsion. It is one of the many papers taken in
reference by ROV and AUV designers for the
development of bio-inspired machines capable of moving
in water without using propellers..


Date of publication: 1995
Authors: Timothy W. McLain, Stephen M. Rock
Experiments using the OTTER vehicle conducted at the
Monterey Bay Aquarium Research Institute (MBARI) have
shown that dynamical interactions between a robotic arm
and an underwater vehicle can be very significant due to
the hydrodynamic forces acting on the arm as it moves
through the water. Using a new, highly accurate model of
hydrodynamic interaction forces, which was developed as
part of this research, a coordinated arm/vehicle control
strategy has been implemented.


Date of publication: 1996
Authors:
Timothy W. McLain, Stephen M. Rock. Michael J. Lee
Adding manipulators to small autonomous underwater
vehicles (AUVs) can pose significant control challenges
due to hydrodynamic interactions between the arm and
the vehicle.
This document discuses experiments conducted at the
Monterey Bay Aquarium Research Institute (MBARI) which
shown that dynamic interactions between an arm and a
vehicle can be very significant. This document is still taken
as a reference by engineers making research on
manipulators.


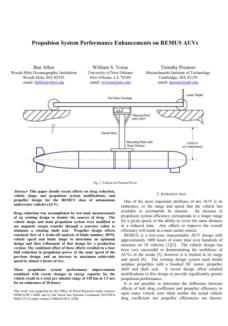
Date of publication: 2000
Authors: Ben Allen, William S. Vorus, Timothy Prestero
This paper details recent efforts on drag reduction, vehicle
shape, and propulsion system modifications, and propeller
design for the REMUS class of autonomous underwater
vehicles (AUVs).
Drag reduction was accomplished through tow-tank
measurements of an existing design to itemize the sources
of drag. The vehicle's shape and main propulsion system
have been modified to utilize magnetic torque transfer
through a seawater collar, thereby eliminate a rotating
shaft seal.

Date of publication: 2000
Authors: Zhenhua Wang, and Weicheng Cui
As underwater missions become more and more
complex, novel underwater manipulators with better
performance are in demand. Soft underwater
manipulators are judged to be the development
direction and are expected to have better performance
in safe and compliant interaction with the target in
underwater operations, such as biological sampling.
This paper provides an overview of the state-of-the-art
in both hard and soft underwater manipulators,
offering give a prospect for soft underwater
manipulators.


Date of publication: 2004
Authors: Pierre Marty
Over the past decades, ROVs and ROTs have proven to be
very efficient and versatile.
These vehicles have become more sophisticated;
however, they still require a great amount of electrical
energy, as well as constant real-time supervision and
control by highly trained operators.
Support vessels are, therefore, clearly the primary part of
operating expenditures (OPEX) for inspection,
maintenance, and repair (IMR) of deepwater fields, and
the only way to suppress them is to remove the
intervention vehicles' umbilicals, that is to turn ROVs into
Intervention-AUVs (I-AUVs).


Authors:
A.Alvarez, A. Caffaz, A. Caiti, G. Casalino, E. Clerici, F. Giorgi,
L. Gualdesi, A. Turetta, R. Viviani
This paper describes a low-cost prototype autonomus
underwater vehicle (AUV) for collecting data over vertical
ocean sections at selected geographical points. For this
reason, it can navigate on the sea surface and dive only
when measurements are needed. This behavior is similar
to that of aquatic birds that swim on the water's surface
and dive occasionally in search of food.
The paper focuses on the vehicle's communication and
mission planning modules, and on the analysis of field
data to test the vehicle's maneuverability.


Date of publication: 2005
Authors: E.A. De Barros, A. Pascoal, E. de Sa
The paper addresses the problem of autonomous
underwater vehicle (AUV) modeling and parameter
estimation as a means to predict the expected dynamic
performance. This underwater vehicles and thus provide
solid guidelines during the design phase. The use of
analytical and semi-empirical (ASE) methods to predict the
hydrodynamic derivatives of the most popular class of
AUVs is discussed.


Authors:
Wisama Khalil, Guillaume Gallot, and Frederic Boyer
This paper presents the dynamic modeling of a 3-D-serial
underwater eel-like robot using recursive algorithms based
on the Newton-Euler equations. Both direct and inverse
models are discussed in the paper. The inverse dynamic
model algorithm provides the head acceleration and the
joint torques as a function of the joint positions, velocities,
and accelerations.


Date of publication: 2008
Authors: Daniel J. Klein, Patrick K. Bettale, Benjamin I.
Triplett, Kristi A. Morgansen
This document addresses the task of coordinating control
design and implementation for systems of free-moving,
autonomous underwater vehicles linked via underwater
communication. The Kuramoto model approach is used to
construct controls that align or anti-align headings by
treating the heading angle as an oscillator phase. To
accommodate communication events occurring at finite
times, the system dynamics are expressed in discrete time
with communication
events happening at the update instances.


Date of publication: 2008
Authors: Kristi A. Morgansen, Benjamin I. Triplett, and
Daniel J. Klein
This paper discusses techniques from geometric
mechanics and geometric nonlinear control theory are
applied to the modeling and construction of trajectory
tracking algorithms for a free-swimming underwater
vehicle that locomotes and maneuvers using a two-link
actuated “tail” and independently actuated “pectoral fin”
bow planes. Restricting consideration of fluid forces to the
simple effects of added mass and quasi-steady lift and
drag, the resulting system model can be expressed in a
control-affine structure.


Date of publication: 2008
Authors: E.A. De Barros, A. Pascoal, E. de Sa
The paper addresses the problem of autonomous
underwater vehicles (AUVs) modelling and parameter
estimation as a means of predicting the dynamic
performance of underwater vehicles and providing solid
guidelines during their design phase. The use of analytical
and semi-empirical (ASE) methods to estimate the
hydrodynamic derivatives of a popular class of AUVs is
discussed. A comparison is made with the results obtained
by using computational fluid dynamics to evaluate the
bare hull lift force distribution around a fully submerged
body.


Date of publication: 2009
Authors: Shigeo Hirose and Hiroya Yamada
The authors began the biomechanical study by using
actual snakes and the design of snake-like robots in 1971.
There were two reasons for the interest in this snake
research: one was the scientific interest in the mechanism
of the snake’s motion, and another is the engineering
interest in the future applications of snake-like robots.



Click on the
octopus to return to
the top of the page

Date of publication: 1980
Authors: Peter Bosse & Paul J. Heckman Jr.
In the 1970s, the Naval Ocean Systems Center (NOSC)
and other organizations developed a remotely operated
manipulator for a free-swimming submersible. This was
part of a program to improve technology for pollution
prevention and safety in oil and gas operations, as well as
to enhance search and rescue operations at sea.


Date of publication: 2003
Authors: Pepijn van de Ven, Colin Flanagan and Daniel
Toal
This paper reviews studies on the use of neural and fuzzy
networks for controlling unmanned underwater vehicles
(UUVs). It introduces a classification for UUV control
architectures based on AI techniques and uses it to
organize different approaches from the literature. The
paper discusses several projects in detail, categorizes each
control strategy, and provides a qualitative assessment of
their performance based on reported results. It also
outlines the advantages and disadvantages of these
strategies.