












The question of whether robots will one day replace humans is not
new and is highlighted whenever a new invention leads to job losses by
performing the tasks it is designed for more efficiently and at a lower
cost than the people it is believed to replace.
Bio-inspired underwater vehicles equipped with artificial intelligence
(AI) are advancing rapidly, offering new capabilities for exploring and
monitoring aquatic environments. These vehicles, designed to mimic
the locomotion, adaptability, and navigation abilities of marine creatures,
can access areas that are challenging and potentially hazardous for
divers. They can also perform repetitive or long-duration tasks without
fatigue, which is a significant advantage over human capabilities. As an
example of such machines already available to operators, we can refer
to the “underwater swimming manipulator” concepts such as the one
provided by Eelume, which has been previously described in an article
called “About Underwater Swimming Manipulators” in the section
“Equipment to Take into Consideration” on our website.
However, while this article provides an overview of the capabilities of
these new-generation machines, it is advisable to consult the studies
on this topic in the "Studies of ROV and AUV Concepts" section of our
database or other relevant sources for a broader perspective. Given
the wide range of studies available, it is wise to select a few that
illustrate concepts such as "target detection and exploitation", "automatic
path finding and selection", "manipulation", and "general design and
propulsion".
"Target detection and exploitation" functions encompass abilities such
as detecting, classifying, and enumerating devices, algae, fish, etc. The
following documents, among others, may be taken as references to
understand this point:
•
"A survey of AI techniques for control of underwater vehicles" by
Pepijn van de Ven, Colin Flanagan, & Daniel Toal.
•
"Deep Learning on Underwater Marine Object Detection: A Survey" by
MD Moniruzzaman, Syed Mohammed, Shamsul Islam, Mohammed
Bennamoun, and Paul Lavery.
•
"Robust Underwater Object Detection with Autonomous Underwater
Vehicle: A Comprehensive Study" by Dipta Gomes & Dip Nandi
(American International University-Bangladesh)
•
"Underwater target recognition methods based on the framework of
deep learning: A survey" by Bowen Teng and Hongjian Zhao.
•
"Deep learning with self-supervision and uncertainty regularization
to count fish in underwater images" by Penny Tarling, Mauricio
Cantor, Albert Clapés, Sergio Escalera.
•
"Automated Detection, Classification, and Counting of Fish in Fish
Passages with Deep Learning" by Vishnu Kandimalla, Matt Richard,
Frank Smith, Jean Quirion, Luis Torgo, and Chris Whidden.
•
"An Overview of Underwater Vision Enhancement: From Traditional
Methods to Recent Deep Learning" by Kai Hu, Chenghang Weng,
Yanwen Zhang, Junlan Jin, and Qingfeng Xia.
•
"Deep learning based deep-sea automatic image enhancement and
animal species classification" by Vanesa Lopez-Vazquez, Jose Manuel
Lopez-Guede, Damianos Chatzievangelou, and Jacopo Aguzzi.
"Automatic pathfinding and selection" is a function that enables an
underwater vehicle to autonomously select its path to a target and
return to its docking station or launching vessel. The following
documents, among others, provide insight into the ongoing research
concerning this aspect of artificial intelligence:
•
“Learning Dynamics and Trajectory optimization for octopus inspired
Soft Robotic Manipulators”, by Thomas George, Thuruthel Egidio,
Falotico, Federico Renda, and Cecilia Laschi.
•
“Adaptive Navigation Algorithm with Deep Learning for Autonomous
Underwater Vehicle”, by Hui Ma, Xiaokai Mu, and Bo He.
•
“A digital twins enabled underwater intelligent internet vehicle path
planning system via reinforcement learning and edge computing”, by
Jiachen Yang, Meng Xi, Jiabao Wen, Yang Li, and Houbing Herbert
Song
•
A Novel Bio-Inspired Path Planning for Autonomous Underwater
Vehicle for Search and Tracing of Underwater Target, by Adnan Elahi
Khan Khalil, Shahzad Anwar, Ghassan Husnain, Atif Elahi, Zhang
Dong.
•
An Overview of Machine Learning Techniques in Local Path Planning
for Autonomous Underwater Vehicles, by Chinonso E. Okereke, Mohd
Murtadha Mohamad, Nur Haliza Abdul Wahab, Olakunle Elijah,
Abdulaziz Al-Nahari, and S.Zaleha.
"Manipulation" refers to functions that enable remotely operated and
autonomous underwater vehicles to grasp objects with full control,
even if they are fragile and require careful handling. Manipulation also
includes operating various mechanisms without damaging them. The
following studies, among others, can be considered references for this
topic:
•
“Soft Manipulators and Grippers: A Review”, by Josie Hughes, Utku
Culha, Fabio Giardina, Fabian Guenther, Andre Rosendo, and Fumiya
Iida.
•
“Control Strategies for Soft Robotic Manipulators: A Survey”, by
Thomas George Thuruthel, Yasmin Ansari, Egidio Falotico, and Cecilia
Laschi
•
“Model Based Reinforcement Learning for Closed Loop Dynamic
Control of Soft Robotic Manipulators”, by Thomas George Thuruthel,
Egidio Falotico, Federico Renda, and Cecilia Laschi.
•
“Learning from Northern clingfish (Gobiesox maeandricus):
bioinspired suction cups attach to rough surfaces”, by Petra Ditsche,
and Adam Summers.
•
“Research development of soft manipulator: A review”, by Lu
Zongxing, Li Wanxin, and Zhang Liping.
•
Actuation Technologies for Soft Robot Grippers and Manipulators: A
Review”, by Shadab Zaidi, Martina Maselli, Cecilia Laschi, & Matteo
Cianchetti.
•
“Applications of Bioinspired Reversible Dry and Wet Adhesives: A
Review”, by Minsu Kang, Kahyun Sun, Minho Seong , Insol Hwang,
Hyejin Jang, Seongjin Park, Geonjun Choi, Sang-Hyeon Lee, Jaeil Kim
and Hoon Eui Jeong.
•
“Bioinspired Underwater Adhesion to Rough Substrates by Cavity
Collapse of Cupped Microstructures”, by Yue Wang, and René Hensel.
•
“Underwater Robot Manipulation: Advances, Challenges and
Prospective Ventures” by Sara Aldhaheri, Giulia De Masi, `Eric Pairet,
and Paola Ardon.
"General design and propulsion" refers to concepts that mimic the
forms, propulsion methods, and behaviours of underwater creatures.
This includes machines designed with bio-inspired exoskeletons that
enable access to areas unreachable by conventional machines and
mitigate collision-induced accelerations, thereby reducing stress on the
vehicle's components and minimizing environmental impact. "General
design and propulsion" also encompasses a new generation of
software to control machines capable of performing tasks
autonomously or designed to assist the operator efficiently. The
selection below may be considered to enhance understanding of this
future aspect of underwater vehicles:
•
“A hybrid dynamic model for bio-inspired robots with soft
appendages - Application to a bio-inspired flexible flapping-wing
micro air vehicle”, by Mathieu Porez, Frederic Boyer, and Ayman
Belkhiri.
•
“Improved Lighthill fish swimming model for bio-inspired robots -
Modeling, computational aspects, and experimental comparisons”, by
Mathieu Porez, Frederic Boyer, and Auke Ijspeert.
•
“SAUV - A Bio-Inspired Soft-Robotic Autonomous Underwater
Vehicle” by Fabian Plum, Susanna Labisch, and Jan-Henning Dirks.
•
“Motion control of unmanned underwater vehicles via deep imitation
reinforcement learning algorithm” by Zhenzhong Chu, Bo Sun, Daqi
Zhu, Mingjun Zhang, Chaomin Luo.
•
“A Perspective on Cephalopods Mimicry and Bioinspired Technologies
toward Proprioceptive Autonomous Soft Robots” by Goffredo
Giordano,Marco Carlotti, and Barbara Mazzolai.
•
“Underwater Soft Robotics: A Review of Bioinspiration in Design,
Actuation, Modeling, and Control” by Samuel M. Youssef, MennaAllah
Soliman, Mahmood A. Saleh, Mostafa A. Mousa, Mahmoud Elsamanty,
and Ahmed G. Radwan.
•
“Recent Progress in Modeling and Control of Bio-Inspired Fish
Robots”, by Boai Sun, Weikun Li, Zhangyuan Wang, Yunpeng Zhu, Qu
He, Xinyan Guan, Guangmin Dai, Dehan Yuan, Ang Li, Weicheng Cui,
and Dixia Fan.
•
“Advances in Autonomous Underwater Robotics Based on Machine
Learning” by Antoni Burguera, and Francisco Bonin-Font.
•
“Reinforcement Learning for Autonomous Underwater Vehicles via
Data-Informed Domain Randomization” by WenjieLu, Kai Cheng, and
Manman Hu.
After reviewing these documents, one might conclude that the use of
divers will soon become obsolete, given that robots can perform all the
tasks typically assigned to divers without experiencing fatigue or
requiring decompression, and with greater accuracy. It is true that
divers from my generation, particularly those who began their careers
in the eighties and nineties, have witnessed many tasks traditionally
performed by divers being gradually transferred to various
underwater vehicles. Therefore, it is reasonable to anticipate that the
changes brought about by the introduction of robotics in underwater
operations will continue.
However, contrary to what some might believe, I do not think this
signifies the end of the era for divers. Rather than replacing divers
outright, AI-equipped bio-inspired vehicles should serve as tools that
complement human efforts. For example, ROVs and AUVs are
commonly used to undertake preliminary surveys, monitor
environments, and perform data collection tasks, which can reduce
the risks and physical demands on divers. Additionally, even though AI
and robotics technologies are advancing, there are still limitations in
terms of decision-making under unpredictable conditions, handling
unexpected scenarios, and performing tasks that require high skills
and critical thinking. Thus, these marvelous machines are usually
specialized for particular tasks and cannot handle situations beyond
those their designers have planned. It is important to consider that
there are humans behind artificial intelligence, whatever the software's
complexity and the impressive results it may provide. Thus, there will
always be situations where human skills, decision-making capabilities,
and adaptability are crucial, particularly when nuanced judgment is
necessary.
Another point to consider is that the deployment of such technology
involves economic considerations such as the cost of development,
deployment, and maintenance.
Therefore, assuming that bio-inspired underwater robots will replace
divers is an inaccurate analysis that has often been made previously.
For instance, during the 1990s, Norwegian authorities responsible for
oilfield exploitation contemplated replacing divers with ROVs. However,
they soon realized these machines had limitations and that this
decision led to unexpected ethical considerations. Consequently, they
reverted to developing the NORSOK standards U 100 to better regulate
diving activities rather than eliminating them. Although technology has
significantly advanced in favour of robotics over the past 30 years, the
core issue remains unchanged. Thus, the appropriate approach is not
to eliminate the role of divers but to utilize these technologies alongside
divers to enhance the efficiency and safety of underwater operations.
To support this reasoning, we can refer to the space industry, which,
despite extensive use of robotics, has continued to send people to
Skylab and plans to send people to the moon and Mars in the near
future. Considering the cost and necessary precautions to send people
into space, we can infer that doing so is based on substantial reasons.
However, it is clear that the nature of the tasks performed by divers
will have to evolve, requiring a change in their professional profile.
Therefore, in addition to being highly specialized in specific tasks, they
will have to learn to work in symbiosis with these tools, which implies a
minimum understanding of how these machines are designed. In
addition, divers and supervisors must be adequately equipped to work
with these machines and to replace them when necessary or more
appropriate. On this last point, companies often show a lack of
imagination and investment. Efforts should therefore be stepped up.
•
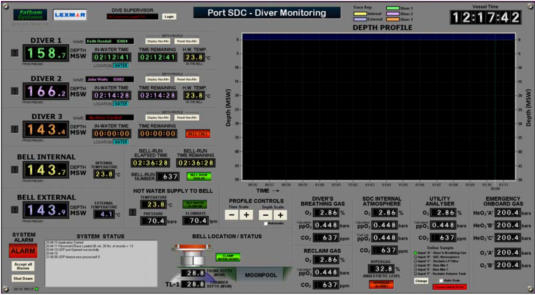
"Diver monitoring systems", as described in the article published in
the "Equipment to Consider" section, have been on the market for
about ten years. Although their use is mandatory in some countries,
such as Norway, under the NORSOK standards, they remain
underutilized despite the valuable information these systems
provide. These devices have the potential to provide more data than
they currently do. However, it is clear that manufacturers will not
develop a product that is not selling as well as expected.


Click on the
octopus to return to
the top of the page
•
Although digital communication systems have advanced and offer
improved clarity. However,their use in operations where heliox and
trimix mixtures are breathed is not yet systematic.

•
Helmets are essential components of diving equipment that have
remained similar to those used in the 1960s for a very long time,
thus maintaining working conditions reminiscent of those faced by
pioneers in the 19th century. It is important to highlight the fact that
since the beginning of this century, militaries have equipped jet
fighter and attack helicopter pilots with head-mounted devices such
as the Thales Systems Scorpion. These devices provide enhanced
vision, target designation, real-time video display, navigation
information, and other critical data about the aircraft's major
components.

Helmet “Thales Scorpion”
- Enhanced vision,
- Target designation,
- Real-time video display,
- Navigation information,
- and other critical data about the
aircraft's major components.
(https://www.thalesgroup.com/)
In conclusion, without integrating the technologies above, which are
currently available, divers will not be able to work in symbiosis with
current and future generations of underwater vehicles. Nor will they
be able to efficiently replace these vehicles in operations where
employing a diver, provided with relevant communication systems,
would be preferable.
Of course, implementing the working policy promoted above will be
hindered by the adverse effects of guidelines and standards that
managers misinterpret due to their lack of knowledge of diving
operations and the technologies discussed. This frequently results in
behaviors bordering on panic when a diver is deployed and the
issuance of inappropriate procedures and policies aimed at removing
all divers from operations, thereby rendering them jobless. Such a
policy will result in a deficiency when these managers are confronted
with situations where the use of machines is far from being the most
relevant, and the use of divers will be preferable, as has been
observed in the past. Therefore, considering that these new
technologies will allow for better control of diver safety and efficiency,
provided they are adopted and correctly implemented, efforts should
be made to correct this problem and achieve a more balanced
approach from client and company management teams. We strive to
accomplish this with our documents, which are based on scientific
facts and common sense.
Using the same approach, Coda Octopus, a company headquartered
at 300 S Hiawassee Road #104-105, Orlando, USA, conducted
studies for the US Navy that resulted in the Diver Augmented Vision
Display System (DAVD), which is now available to commercial diving
companies. This system is a binocular, see-through heads-up
display that provides the diver with critical data such as sonar
images, graphics, and augmented and virtual reality. It also
supports navigation in low or zero visibility conditions with diver
tracking and localization on a map. Therefore, it is safe to assume
that the technologies to enhance divers' capabilities exist today and
will continue to develop in the near future. Note that Coda Octopus
Group can be contacted through their website:
https://www.codaoctopusgroup.com/
