











Studies of ROV concepts 2020

Date of publication: 2020
Authors:
Dewei Li, Ye Li, Zhongjun Ding, Xiangxin Wang, &
Baohua Liu
Abstract:
An underwater robot is an important platform to carry
various sensors and working tools to finish the in situ
measurement and sampling in the deep sea. These
devices should have a small volume and weight due to
the limited loading capacity of the vehicle and should be
designed to reach the operational depth. This study
describes a detector system that can obtain data in situ,
including a titanium alloy electronic cabin and a
temperature probe.


Date of publication: 2020
Authors: Syed Mohamad Shazali Bin Syed Abdul
Hamid, Muhamad Addeen Bin Zailee.
Abstract:
While most ROVs are controlled by varying their motion, it
is beneficial to be able to control the orientation directly
through a handheld device. That offers the opportunity to
provide haptic feedback on such handheld devices. The
motivation of this work is to give the sensation of the
rolling object to a user when an ROV, controlled through
the handheld device, rolls on the x-axis.



Date of publication: 2020
Authors: Gyunam Kim & Katsuhiro Hirata
This study aims to present a new two-degree-of-freedom
(DOF) linear resonant actuator (LRA) and its motion
control method without a position sensor.



Date of publication: 2020
Authors:
Talha Gülgün, Göksel Alankaya, Muhammet Emin
Duran, Mertcan Erdogdu, Ismail Yalçınkaya, Akif
Durdu, Hakan Terzioglu.
In this study, it is defined how the thrusters positioning
should be for the underwater vehicle designed to
meet the requirements of a user to be the mos efficient
and suitable vehicle for the desired environment of
mobility.


Date of publication: 2020
Authors:
Simon Watson, Daniel A. Duecker, Keir Groves.
The inspection of aquatic environments is a challenging
activity, which is made more difficult if the environment is
complex or confined, such as those found in nuclear
storage facilities and accident sites, marinas, and
boatyards, liquid storage tanks, or flooded tunnels and
sewers. This article presents a review of the state-of-the-art
in localisation technologies for these environments and
identifies areas of future research to overcome the
challenges posed.


Date of publication: 2020
Authors:
Fabian Plum, Susanna Labisch, Jan-Henning Dirks.
Abstract:
Autonomous and remotely operated underwater vehicles
allow us to reach previously inaccessible places and
perform complex repair, exploration, and analysis tasks. As
their navigation is not infallible, they may cause severe
damage to themselves and their often fragile
surroundings, such as flooded caves, coral reefs, or even
divers in case of a collision.


Authors:
Matteo Franchi, Francesco Fanelli, Mattei Bianchi,
Alessandro Ridolfi & Benedetto Allotta.
Underwater robots are nowadays employed for many
different applications; during the last decades, a wide
variety of robotic vehicles have been developed by both
companies and research institutes, different in shape, size,
navigation system, and payload. While the market needs
to constitute the real benchmark for commercial vehicles,
novel approaches developed during research projects
represent the standard for academia and research bodies.
An interesting opportunity for the performance
comparison of autonomous vehicles lies in robotics
competitions, which serve as a useful testbed for state-of-
the-art underwater technologies and a chance for the
constructive evaluation of strengths and weaknesses of
the participating platforms.

Authors:
Dianne L. McLean, Miles J. G. Parsons, Andrew R. Gates,
Mark C. Benfield, Todd Bond. David J. Booth, Michael
Bunce, Ashley M. Fowler, Euan S. Harvey, Peter I.
Macreadie, Charitha B. Pattiaratchi, Sally Rouse, Julian C.
Partridge, Paul G. Thomson, Victoria L. G. Todd, and
Daniel O. B. Jones.
Remotely operated vehicles (ROVs) are used extensively by
the offshore oil and gas and renewables industries for
inspection, maintenance, and repair of their infrastructure.
With thousands of subsea structures monitored across the
world’s oceans from the shallows to depths greater than
1,000 m, there is a great and underutilized opportunity for
their scientific use. Through slight modifications of ROV
operations, and by augmenting industry work-class ROVs
with a range of scientific equipment, the industry can fuel
scientific discoveries, contribute to an understanding of
the impact of artificial structures in our oceans.


Date of publication: 2020
Authors:
Kyle L. Walker, Adam A. Stokes, Aristides Kiprakis, &
Francesco Giorgio-Serchi.
For controlling Unmanned Underwater Vehicles (UUVs)
in deep water, Proportional-Integral-Derivative (PID)
control has previously been proposed. Disturbances due
to waves are minimal at high depths, so PID provides an
acceptable level of control for performing tasks such as
station-keeping. In shallow water, disturbances from
waves are considerably larger, and thus, station-keeping
performance naturally degrades. By means of simulation,
this letter details the performance of PID control when
station keeping in a typical shallow-wave operating
environment, such as that encountered during inspection
of marine renewable energy devices.


Authors: Di Wu, Fei Yuan, & En Cheng
The optical images collected by remotely operated
vehicles (ROV) contain a lot of information which
plays an important role in ocean exploration.
However, due to the absorption and scattering
characteristics of the water medium, some of the
images suffer from serious color distortion. These
distorted color images usually need to be enhanced
so that we can analyze them further. However, no
image enhancement algorithm currently performs
well in any scene. Therefore, to monitor image quality
in the display module of ROV, a no-reference image
quality predictor (NIPQ) is proposed in this paper.


Date of publication: 2020
Authors:
Roman Gabl, Thomas Davey, Yu Cao, Qian Li, Boyang
Li, Kyle L. Walker, Francesco Giorgio-Serchi, Simona
Aracri, Aristides Kiprakis, Adam A. Stokes, and David M
Ingram
Hydrodynamic forces are an important input value for the
design, navigation, and station keeping of underwater
Remotely Operated Vehicles (ROVs). The experiment
investigated the forces imparted by currents (with
representative real-world turbulence) and waves on a
commercially available ROV, namely the BlueROV2 (Blue
Robotics, Torrance, USA).


Authors:
Robin Rofallski, Patrick Westfield, Jean-Guy Nistad,
Annette Buttner & Thomas Luhmann.
Observation and monitoring of wrecks are an integral
part of the duties of hydrographic offices such as BSH.
A common practice consists of first surveying wrecks
using vessel-based multibeam echo sounding systems
and subsequently having divers inspect them. To
provide an objective procedure and set a baseline for
monitoring wrecks, unmanned underwater vehicles
equipped with imaging systems can be used to inspect
wrecks and other obstructions in more details. This
paper presents a workflow for combining multibeam
soundings and photogrammetric point clouds
generated by an ROV-based camera system.


Date of publication: 2020
Authors:
Syed Mohamad Shazali Bin Syed Abdul Hamid, Muhamad
Addeen Bin Zailee.
While most ROVs are controlled by varying their motion, it
is very helpful to be able to control the orientation directly
through a handheld device. This offers the opportunity to
provide haptic feedback on such handheld devices. A
haptic device provides force feedback as a cue signal to a
user. The motivation of this work is to give the sensation
of a rolling object to a user when an ROV, controlled
through the handheld device, rolls on the x-axis.



Date of publication: 2020
Authors:
Iis Hamsir Ayub Wahab, Rintania Elliyati Nuryaningsih,
Achmad Pradjudin Sardju
In designing of Remotely Operated Vehicle (ROV), the
most important issue is how to formulate the
movements of the vehicle. This paper proposes the
mathematical model of ROV movement.


Date of publication: 2020
Author: Rodney Rountree
Current ROV and AUV instruments are poorly designed
for behavioral ecology studies. They are designed for
continuous movement with the capability of hoovering
for short periods, but only by using continuous
propulsion. Operation without lights is also difficult for
ROVs.

Date of publication: 2020
Authors:
Philipp Fischer, Holger Brix , Burkard Baschek,
Alexandra Kraberg, Markus Brand , Boris Cisewski, Rolf
Riethmüller, Gisbert Breitbach, Klas Ove Möller, Jean-
Pierre Gattuso, Samir Alliouane, Willem H. van de Poll,
and Rob Witbaard.
Cabled coastal observatories are often seen as future-
oriented marine technology that enables scientists to
conduct observational and experimental studies
underwater year-round, independent of physical
accessibility to the target area.


Date of publication: 2020
Authors: Michael Stein, Henri Parviainen
Purpose:
Affordable prices and operational technology have
shifted ROV operation from offshore to the ports and
allow for a whole new dimension of unmanned
inspection as part of risk management.
This paper argues that enhancing service quality while
reducing costs can to a large part be achieved
through innovative technology where ROV is seen as
such a mean. The main areas of service are seen to be
on the safety and the security side or maritime
operations.


Date of publication: 2020
Authors:
Cierra Braga, Kelli Hunsucker, Caglar Erdogan,
Harrison Gardner, & Geoffrey Swain.
A proof-of-concept study was designed to investigate
using an Ultraviolet C (UVC) lamp mounted on a hull-
crawling remotely operated vehicle (ROV) to prevent
biofouling on a ship hull. A wheeled cart with a UVC.
lamp was built to expose two large test panels to UVC
The test panels were coated with an ablative copper
antifouling and a silicone fouling release coating, and
these were immersed in seawater at Port Canaveral,
Florida.


Date of publication: 2020
Authors: S Manullang, A Pusaka, A Setiawan.
The purpose of this study is to design a mini Remote
Operated Vehicles (ROV) which based on remote control
underwater robot, and test its movements, the
longitudinal and vertical movements in calm water.


Date of publication: 2020
Authors:
Wenjun Xu, Jianfeng Wei, Renyou Yang, Aidong
Zhang
ROVs are the primary tool used in marine environments to
conduct dexterous manipulation tasks and teleoperation,
requiring experienced operators. In an attempt to ease the
operators' fatigue and potentially improve task efficiency,
the authors propose an image-based framework to
automate underwater routine tasks via imitation learning.


Authors:
Jian Cao, Yushan Sun, Guocheng Zhang, Wenlong
Jiao, Xiangbin Wang, and Zhaohang Liu.
This article addresses the adaptive target tracking control
design for an underactuated autonomous underwater
vehicle subject to uncertain dynamics and external
disturbances induced by the ocean currents. The moving
target tracking guidance strategy is designed based on the
line-of-sight method, and the target tracking reference
speed and angular velocity are given.






Authors:
Edin Omerdic, Petar Trslic, Admir Kaknjo, Anthony
Weir, Muzaffar Rao , Gerard Dooly and Daniel Toal
Typically, open-frame underwater vehicles have p
actuators (thrusters) for the motion in the horizontal plane.
In this case, the control allocation problem is very complex
and hard to visualize because the normalized constrained
control subset is a p-dimensional unit cube. This paper
aims to give a clear picture and a geometric interpretation
of the problem and to introduce a hybrid method based
on the integration of a weighted pseudo-inverse and the
fixed-point method.


Authors: Thomas George Thuruthel, Federico Renda, and
Fumiya Iida
Modeling of soft robots is typically performed at the
static level or a second-order fully dynamic level.
Static controllers, based on the kinematic relations, tend to
be the easiest to develop, but by sacrificing accuracy,
efficiency, and the natural dynamics.
Controllers developed using second-order dynamic
models tend to be computationally expensive but allow
optimal control. The authors propose that the dynamic
model of a soft robot can be reduced to a first-order
dynamical equation owing to their high damping and
low inertial properties, as typically observed in nature, with
minimal loss in accuracy.


Authors:
Marcos de la Cruz, Gustavo Casañ, Pedro Sanz, and
Raúl Marín
There is still a long way to go before AUVs (Autonomous
Underwater Vehicles) will be able to cope with really
challenging missions. The solution adopted is mainly based
on remote-operated vehicle (ROV) technology. These
ROVs are controlled from support vessels by using
complex human-robot interfaces. Therefore, it is necessary
to reduce the complexity of these systems to make them
easier to use and reduce the stress on the operator. In this
paper, the authors present an HRI (Human-Robot
Interface) module that includes virtual reality (VR)
technology.


Authors:
Reynaldo Morillo, Justin Furuness, Cameron Morris,
James Breslin
The authors of this paper focused on two crucial hijack
attacks of ROVs: “subprefix hijacks” and “non-routed
prefix hijacks”. For both, they showed that ROVs provide
disappointing security. In addition, they presented a new
attack called “superprefix hijacks”, which completely
circumvents ROV’s defense for non-routed prefix hijacks.
They complete this paper with the presentation of
“ROV++”, an extension that significantly improves ROV
security.


Authors:
Elena Buscher, Darcy L. Mathews, Cheryl Bryce,
Kathleen Bryce, Darlene Joseph, and Natalie C. Ban
Ecosystem assessments can be completed over varying
scales through different methodologies or a combination
of them. Despite these many technologies, most marine
environments lack comprehensive habitat assessments.
Remotely operated vehicles (ROVs) provide an
opportunity to conduct small- to meso scale ecological
surveying without some of the constraints of commonly
used methodologies such as scuba.


Authors: Francesca Negrello, Hannah S. Stuart and
Manuel G. Catalano
Despite decades of dedicated research, the effective
deployment of versatile robot hands in the real world is still
limited to a few examples. This paper reviews hands that
have found applications, aiming to discuss open
challenges with more articulated designs and novel trends
and perspectives.


Authors: Yonggang Jiang, Peng Zhao, Zhiqiang Ma,
Dawei Shen, Gongchao Liu, Deyuan Zhang
Biological flow receptors show astonishing performance
and are used as models for the design of novel flow
sensors. However, the functional importance of interfacial
microstructures is seldom discussed in previous review
papers. Herein, this review summarises the underlying
biomechanical principles in the biological flow receptors
and describes the recent progress in bio-inspired flow
sensors, in which the underlying sensing-enhancement
mechanisms are emphasised.


Date of publication: 2020
Authors: Yue Wang, Victor Kang, Walter Federle,
Eduard Arzt, and René Hensel
Switchable underwater adhesion can be useful for
numerous applications, but it is extremely
challenging due to the presence of water at the
contact interface.
This document describes deformable cupped
microstructures that can switch between high and
low adhesion strength by adjusting the retraction
velocity. The velocity at which the switch occurs is
determined by specific design parameters of the
cupped microstructure, such as the width and angle.


Date of publication: 2020
Authors: Guijie Liu, Shuikuan Liu, Yingchun Xie,
Dingxin Leng, and Guanghao Li
Fish not only have an extraordinary ability for
underwater movement but also have high mobility
and flexibility. The low energy consumption and high
efficiency of fish's propulsive method provide new
ideas for the research of bionic underwater robots
and bionic propulsive technology. In this paper, the
swordfish is taken as the research object, and the
mechanism of caudal fin propulsion is preliminarily
explored by analyzing the flow field structure
generated by the swing of the caudal fin.


Authors: Zheyuan Gong, Xi Fang, Xingyu Chen,
Jiahui Cheng, Zhexin Xie, Jiaqi Liu, Bohan
Chen, Hui Yang, Shihan Kong, Yufei Hao,
Tian miao Wang, Junzhi, Yu, and Li Wen
The authors developed an underwater robotic system
with a three-degree-of-freedom (3-DoF) soft manipulator
for delicate grasping in shallow water.
They present the design and fabrication of a soft
manipulator with an opposite bending and stretching
structure (OBSS). Then, they propose a simple and
efficient kinematic method for controlling the spatial
location and trajectory of a soft manipulator’s end effector.


Authors:
Zach J. Patterson, Andrew P. Sabelhaus, Keene Chin,
Tess Hellebrekers, and Carmel Majidi.
This document presents a mobile and untethered
underwater crawling soft robot, paired with a testbed that
demonstrates closed-loop locomotion planning.
It is inspired by the brittle star, with five flexible legs
actuated by a total of 20 shape-memory alloy (SMA) wires,
providing a rich variety of possible motions.


Authors: Songlin Nie, Xiaopeng Liu, Hui Ji, Zonghai
Ma, & Fanglong Yin
A water hydraulic flexible gripper with a three-fingered
structure is developed to deal with the problem of poor
adaptability for the existing underwater gripper.
This gripper driven by water hydraulics can realize flexible
grasping and possesses simple structure, high pressure-
bearing, strong adaptability, and capability of
anti-jamming to the water environment and is easy to
control. In particular, the water hydraulic flexible gripper
system is an open system in relation to the underwater
environment, with the water source being supplied
directly by the aquatic environment, eliminating the effects
of the back pressure generated by the underwater
environment.


Authors: Han-Sol Jin, Hyunjoon Cho, Ji-Hyeong Lee,
Huang Jiafeng, Myung-Jun Kim, Ji-Youn Oh,
and Hyeung-Sik Cho
Underwater operating platforms face difficulties regarding
power supply and communications. This study proposes a
hybrid surface and underwater vehicle (HSUV) and
presents the development of the platform, control
algorithms, and results of field tests.
The HSUV is capable of supplying reliable power to
the unmanned underwater vehicle (UUV) and obtaining
data in real time by using a tether cable between the
UUV and the unmanned surface vehicle (USV). The
HSUV uses global positioning system (GPS) and ultra-
short base line sensors to determine the relative location of
the UUV.



Click on the
octopus to return to
the top of the page

Authors: Dipta Gomes, & Dip Nandi
Traditional methods often fail to detect objects accurately
underwater due to several challenges. Therefore, robust,
fast, real-time, and accurate detection methods are
required, leading to the use of deep learning
approaches.This paper examines and compares the most
recent techniques in underwater object detection.


Authors:
Zhenzhong Chu, Bo Sun, Daqi Zhu, Mingjun Zhang,
Chaomin Luo
The authors propose a motion control algorithm for
unmanned underwater vehicles (UUVs) that combines
deep imitation learning with twin delay deep deterministic
policy gradient (TD3) techniques. This method, known as
imitation learning (IL) TD3, uses supervised learning to
speed up training by cloning behaviours from existing
control data.


Authors: Chengshi Wang, Chase G. Frazelle, John R.
Wagner,and Ian D. Walker
In this paper, a new method for controlling the movement
of a multi-section continuum robot in 3D space is
developed. This approach ensures precise control over the
robot's orientation, curvature, and section length by
linking its dynamic behavior to a virtual robot with discrete
joints. These joints mimic the movements of a continuum
robot section, based on the assumption of constant
curvature.


Authors: Lu Zongxing, Li Wanxin, and Zhang Liping
This paper describes the current state of soft manipulator
actuation methods, structures, and principles. In particular,
the authors present the fluid-elastic pneumatic joint drive,
which enables controlled bending of different finger joints.
A detailed classification and description of the principles of
smart materials for the application of flexible hands is
provided. Additionally, the principles of two new driving
modes, biological driving and gas-liquid driving, presented.


Date of publication: 2020
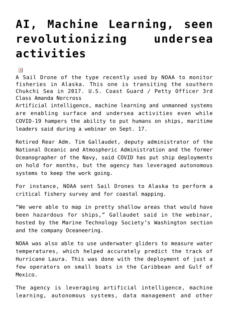
Author: Brett Davis
A sail drone of the type recently used by NOAA to
monitor fisheries in Alaska. This one crosses the southern
Chukchi Sea in 2017. U.S. Coast Guard / Petty Officer 3rd
Class Amanda Norcross Artificial intelligence, machine
learning, and unmanned systems are enabling surface
and undersea operations, even as COVID-19 hampers the
ability to put people on ships, maritime leaders said during
a webinar on 17 September.

Authors:
Christopher Whitt, Jay Pearlman, Brian Polagye, Frank
Caimi, Frank Muller-Karger, Andrea Copping, Heather
Spence, Shyam Madhusudhana, William Kirkwood,
Ludovic Grosjean, Bilal Muhammad Fiaz, Satinder Singh,
Sikandra Singh, Dana Manalang, Ananya Sen Gupta, Alain
Maguer, Justin J. H. Buck, Andreas Marouchos, Malayath
Aravindakshan Atmanand, Ramasamy Venkatesan,
Vedachalam Narayanaswamy, Pierre Testor, Elizabeth
Douglas, Sebastien de Halleux, and Siri Jodha Khalsa
Autonomous platforms are already making observations
over a wide range of temporal and spatial scales,
measuring salinity, temperature, nitrate, pressure, oxygen,
biomass, and many other parameters. However, future
autonomous systems need to be more affordable,
modular, powerful, and easier to operate.


Authors: Bowen Teng, and Hongjian Zhao
Deep learning has significantly improved the ability of
autonomous underwater vehicles (AUVs) to identify
targets underwater. This is crucial for tasks such as
underwater exploration, rescue operations, and security
measures. Recently, researchers have shown a lot of
interest in this topic. This article delves into how deep
learning in analyzing underwater images and provides a
brief overview of various methods for recognizing
underwater targets.


Authors: Chinonso Okereke, Nur Haliza Abdul Wahab,
and Mohd Murtadha
Autonomous underwater vehicles (AUVs) often struggle
with path planning due to the harsh and constantly
changing underwater environment. Path planning
involves finding the optimal route for the AUV to take
from start to finish. Machine learning can help solve this
problem. This paper examines the path planning problem,
evaluates machine learning algorithms for path planning
in single and multiple AUVs, and proposes future research
directions.




Authors:
Okunlola Babatunde Abraham, Okogbue Emmanuel
Chilekwu, Olabanji Olayinka Mohammed, Ewetumo
Theophilus, Adeboye Ademola Olumide Christopher
This document describes the purpose, design,
construction, and potential applications of a Wireless
Mobile Underwater and Surface Vehicle for Hydrological
Parameters Monitoring (WMUSVHPM). It outlines the
phases of development, the materials used, and the
vehicle's capabilities, emphasizing its utility in
oceanographic data collection and various underwater
tasks. It also highlights the advantages of using such a
vehicle, including its ability to operate without being
connected to a support vessel and its potential for future
improvements.


Authors: Tingting Zhuang, Xunru Liang, Bohuan Xue,
Xiaoyu Tang
This document describes a new method for improving
object detection in advanced driver assistance systems
under low-visibility conditions by developing and
optimizing an in-vehicle infrared (IR) object detection
system using a modified algorithm with enhanced pre-
processing techniques. It also highlights the deployment
of this system and presents experimental results
demonstrating its superior performance compared to
existing methods.


8 - Machine learning for modeling animal movement
Author: Dhanushi A. Wijeyakulasuriya, Elizabeth W.
Eisenhauer, Benjamin A. Shaby, Ephraim M.
Hanks
Advanced driver assistance systems usually depend on
visible images for information. However, in low-visibility
weather, such as heavy rain or fog, these images can be
inaccurate. This study proposes an in-vehicle infrared (IR)
object detection system using a modified algorithm. This
method enhances IR image processing and runs efficiently
on Jetson Nano, achieving 82. 7% mean Average
Precision and 55. 9 frames per second.
