











About Underwater Swimming Manipulators

Click on the
octopus to return to
the top of the page
Description
Underwater Swimming Manipulators are bio-inspired Autonomous
Underwater Vehicles (AUVs) designed to conduct observation and
light intervention tasks more economically than Remotely Operated
Vehicles (ROVs) and classic torpedo-shaped AUVs.
They consist of a series of modules joined together by specific
articulated joints to form a flexible body whose length varies
according to the number of components, with a diameter usually
approximately 10 to 15 cm, which gives them the appearance of a
snake or an eel.
This design allows them to access narrow spaces where classical
ROVs and AUVs cannot enter. They are propelled and guided by
thrust devices located at different points along the body. However,
their shape also allows them to swim like an eel or a sea snake in
case propulsion thrusters are out of service. Note that each module
is dedicated to a specific task, such as propulsion and direction,
observation (camera and lighting), detection, mapping, and others
that can be arranged according to the operator's needs. Tools, such
as grippers, pliers, cutters, brushes, and others, can be mounted at
the extremities.
Like conventional AUVs, Underwater Swimming Manipulators are
designed to stay underwater for long periods, provided that a
docking station to recharge their batteries, transfer data, and install
new programs is available on-site. Note that the docking station is
also designed to offer a range of tools that the machine automatically
selects and installs. These machines are also easily transportable, so
they can be transferred to a site by a small boat or from the facility
to which they are assigned.
"Eelume", a manufacturer part of the Kongsberg Group, a well-
known company that provides a wide range of products and
solutions for the maritime industry, appears to be the most
advanced project utilizing this technology. The pictures below, taken
from the patent file, explain how these machines are designed and
some of their capabilities.
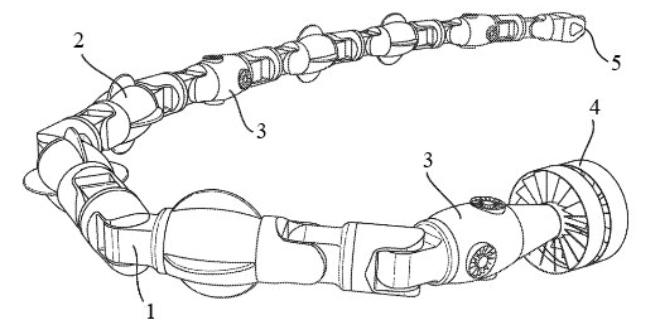
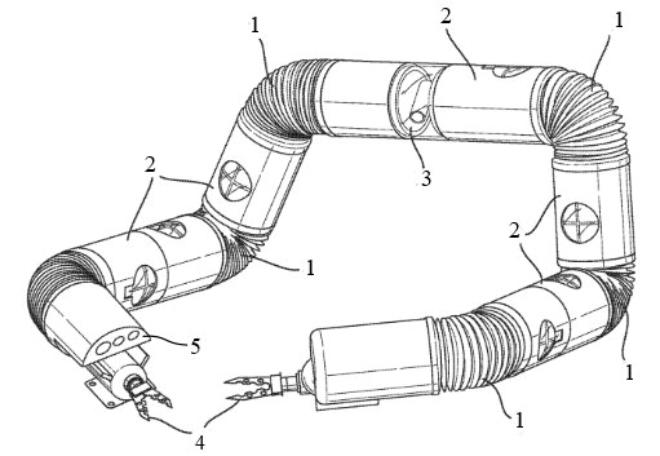
#1: Joint module
#2: Fins
#3: Tunnel thrusters module
#4: Stern propeller module
#5: The front module of the robot can be provided with a tool, a
camera, and various sensors
This configuration allows the robot to swim long distances
We can see that their specific design and modularity allow these
machines to carry out a wide range of inspections and light
interventions on subsea structures. They can also conduct
environmental surveys, such as detecting gas leaks, oil in water,
water salinity and temperature levels, harmful sound emissions, etc.
The machines currently sold are designed to operate at 600 m and
range from 15 to about 50 km, which is, in my opinion, sufficient to
carry out the tasks they are designed for on the oilfield where the
docking station is installed. The Eelume team plans for versions
designed for deeper depths. However, their commercialization will
depend on the market and requests.
Eelume team states that these machines can be mobilized 24/7,
regardless of weather conditions, and can reduce the cost of subsea
operations by up to 90%. Notwithstanding the manifold benefits of
these systems, I lack the means to corroborate this information and
opine that ultimate discretion on this matter will rest with the
operators.
Eelume team also says these robots will replace divers, ROVs, and
classical AUVs. However, even though these robots will undoubtedly
replace ROVs and AUVs for some tasks, I think they have to be
considered more as complementary machines than replacement
ones, as they are not powerful enough to carry out many inspection
and manipulation tasks. Also, note that they are designed to operate
from a docking station that must be installed and maintained, which
normally requires ROV or diver interventions that may not be difficult
to organize in some locations but more complicated in others.
Regarding the replacement of divers, although ROVs and AUVs are
indeed used today for many tasks previously carried out by divers, it
is worth noting that the Norwegian authorities had intended to
discontinue offshore manned diving operations in the 1990s.
However, they soon abandoned this plan and focused on developing
the NORSOK standard U100. This shift was prompted by the
realization that certain tasks could not be carried out as efficiently by
remotely operated vehicles (ROVs) and autonomous underwater
vehicles (AUVs) as divers, who can straightforwardly execute
complex tasks that would otherwise require significant engineering
and a lot of time from ROVs and AUVs.
In conclusion, these robots should be considered efficient
complementary tools to existing systems. However, it is evident that
their implementation will result in a reorganization of the underwater
tasks in the locations where they will be installed.
#1: Joint module
#2: Fins
#3: Tunnel thrusters module
#4: Stern propeller module
#5: The front module of the robot can a tool attached
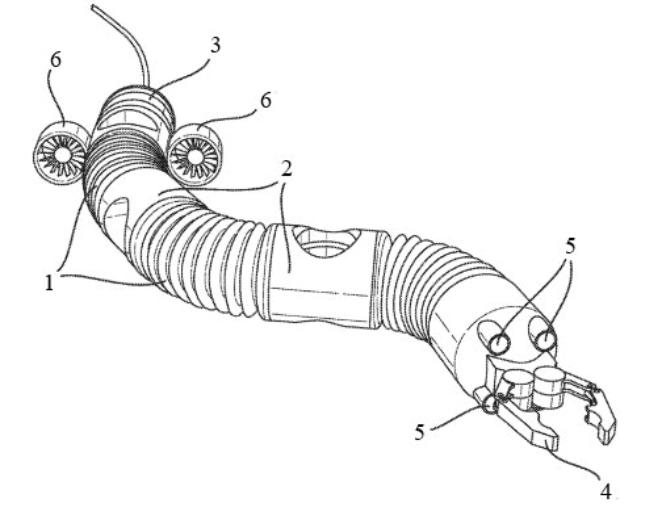
#1: Joint module
#2: Fins
#3: Tunnel thrusters module
#4: Manipulation Tools
#5: Sensors
This configuration allows the machine to use two manipulators or
other tools (one tool at each extremity).
The manufacturer says that this configuration permits operations
over short distances only.
The tunnel thrusters perform the displacement of the machine.
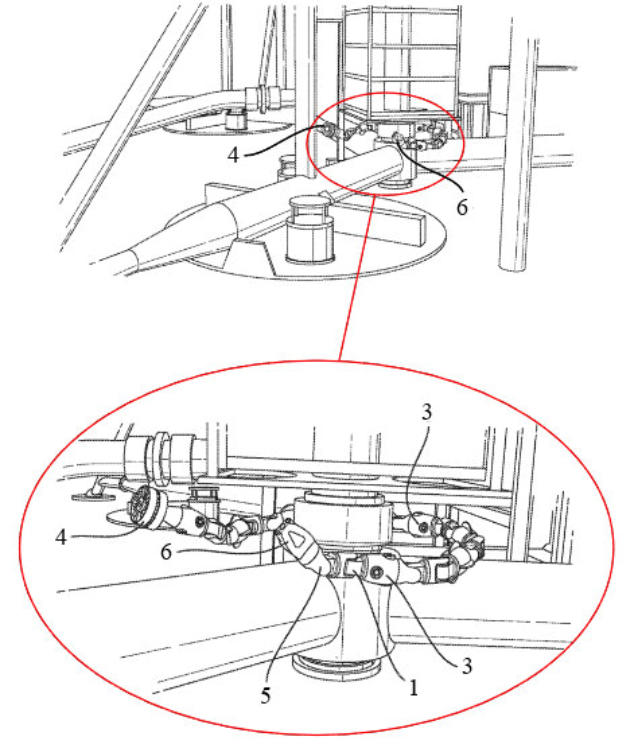
#1: Joint module
#2: Fins
#3: Tunnel thrusters module
#4: Manipulation Tools
#5: Sensors
#6: Side mounted thruster (Longitudinal thrust)
Another configuration that allows the robot to swim long distances
and use tools such as manipulators.
Note that rubber envelopes protect the joints.
Contact Eelume
Address: Transittgata 10, 7042 Trondheim - Norway
Website: https://eelume.com/
Phone: +47 46 500 700
Email: contact@eelume.com
Bibliography
•
Snake-like Robots - Machine Design of Biologically Inspired Robots
Authors: shigeo Hirose, and Hiroya Yamada.
Published in 2009
•
Modeling of underwater swimming manipulators.
Authors: J. Sverdrup-Thygeson, E. Kelasidi, K. Y. Pettersen, J. T.
Gravdahl.
Published in 2016
•
A control framework for biologically inspired underwater
swimming manipulators equipped with thrusters.
Authors: J. Sverdrup-Thygeson, E. Kelasidi, K. Y. Pettersen, J. T.
Gravdahl.
Published in 2016
•
Experimental Investigation of Locomotion Efficiency and Path-
Following for Underwater Snake Robots with and without a Caudal
Fin.
Authors: E. Kelasidi, A. M. Kohl, K. Y. Pettersen, B. H. Hoffmann, J.,
and T. Gravdahl
Published in 2018
•
Fluid parameter identification for an underwater snake robot.
Authors: Eleni Kelasidi, Gard Elgenes, and Henrik Kilvaer
Published in 2018
•
Path Following, Obstacle Detection and Obstacle Avoidance for
Thrusted Underwater Snake Robots
Authors: Eleni Kelasidi, Signe Moe, Kristin Y. Pettersen, Anna m.
Kohl.
Published in 2019
•
The Underwater Swimming Manipulator – A Bio-Inspired AUV
Authors: J. Sverdrup-Thygeson, E. Kelasidi, K. Y. Pettersen, J. T.
Gravdahl
Published in 2020
•
United States Patent - Underwater manipulator arm robot
Applicant: Eelume AS
Inventors: Kristin Y. Pettersen, Pål Liljebäck, Asgeir J. Sørensen,
Øyvind Stavdahl, Fredrik Lund, Aksel A. Transeth, Jan
Tommy Gravdahl
Published in 2020